English
English
 Türkçe
Türkçe




Can there be two different motors in the same efficiency class? Yes. The IE4 Super Premium efficiency class can be achieved both with classic asynchronous (squirrel-cage) motors and with synchronous reluctance (SynRM) motors. Even if the same IE4 marking appears on the nameplate, the structure, starting method, drive need and application suitability of these two motors differ markedly from each other. In this article we address the question “IE4 asynchronous or synchronous reluctance?” along the structure, direct-on-line (DOL) and mandatory-drive axis, and we clarify which is the right choice in which application.
The Same IE4 Class, Two Different Technologies
The IE (International Efficiency) class is a performance indicator that measures the motor’s efficiency; it tells you how efficient the motor is, not how it is built. For this reason it is possible to reach the same IE4 efficiency level with different motor architectures. The two most common routes are:
- IE4 asynchronous (squirrel-cage) motor: an optimised, lower-loss version of the classic asynchronous structure. There is a cage in the rotor and the motor can run directly on line.
- IE4 synchronous reluctance (SynRM) motor: instead of a cage, the rotor has a reluctance (magnet-free, specially laminated) structure. It needs a variable frequency drive to operate.
We addressed the general framework of efficiency classes in our IE3 and IE4 Efficiency Mandate article, and IE4 equivalent selection in our Replacing an IE4 Motor With an Equivalent article.
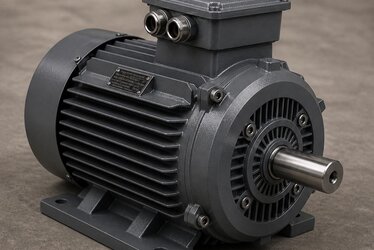
Structural Difference: Squirrel Cage and Reluctance Rotor
The fundamental difference between the two technologies begins at the rotor. The rotor of an asynchronous motor has a squirrel cage cast from aluminium or copper; the stator magnetic field induces current in this cage and rotation is achieved. This induction inevitably creates a certain loss (slip loss) in the rotor. We explained the slip and actual-speed relationship in an asynchronous motor in our Slip and Actual Speed in Asynchronous Motors article. You can examine the difference between squirrel-cage and slip-ring in our Difference Between Squirrel-Cage and Slip-Ring Asynchronous Motors article.
In a synchronous reluctance motor, there is no cage or magnet in the rotor; the rotor consists of a specially channelled lamination pack that directs the magnetic flux. The rotor turns synchronously with the stator field and there is no slip loss. This structure provides high efficiency at part load but requires a drive because the rotor cannot start on its own. We addressed the SynRM structure in our IE5 and Synchronous Reluctance Motors article and the magnet-free rotor advantage in our magnet-free rotor article.
SynRM Should Not Be Confused With a PM Motor
Synchronous reluctance is different from a permanent magnet (PM) motor; there is no magnet in the SynRM rotor, while there is one in a PM motor. We detailed this distinction in our The Difference Between IE5 Synchronous Reluctance and Permanent Magnet (PM) Motors article.
Starting and Drive Difference: DOL or Mandatory Drive?
The most practical difference between the two technologies is the commissioning and drive need:
- IE4 asynchronous: thanks to the cage in its rotor, it can start directly on line (DOL). A drive is not mandatory; it can run with an existing star-delta or soft-starter panel. We examined starting methods in our Starting AC Asynchronous Motors article.
- IE4 synchronous reluctance: it cannot start without a drive; a variable frequency drive is mandatory for it to operate. The motor and drive are usually supplied as a matched package.
This difference directly affects the purchase decision. For a facility that already has a DOL panel and does not want to invest in a drive, IE4 asynchronous is more practical. In an application where a drive is already needed (for example, variable speed), SynRM is advantageous. We explained the logic of running with a VFD in our Asynchronous Motor With a Variable Frequency Drive (VFD) article and the drive requirement of SynRM in our Why Does an IE5 Synchronous Reluctance Motor Not Run Without a Drive? article.
Efficiency Behaviour: Full Load and Part Load
Both IE4 motors offer high efficiency at the nominal point. However, when the load changes their behaviour differs. The synchronous reluctance motor tends to maintain its efficiency better at part load, because there is no induction loss in the rotor. This property stands out in applications whose load constantly varies or that often run at part load. We addressed the part-load efficiency curve in our The Efficiency Curve of the IE5 Synchronous Reluctance Motor article. You can examine the correct load ratio and sizing in our At What Load Should a Motor Run? article.
The Right Choice by Application
Which IE4 technology is right depends on the application’s requirement:
- Fixed-speed, direct-on-line applications: IE4 asynchronous is practical and economical. It is common in conveyor, compressor and general industrial drives.
- Variable-speed, drive-based applications: because a VFD is already needed in pumps and fans, SynRM offers superior efficiency without creating extra drive cost. We explained which applications enter the IE4 threshold in our The IE4 Threshold in Pumps, Fans and Compressors article.
- Applications running a long time at part load: the part-load efficiency of SynRM is an advantage.
- Facilities wanting to keep their existing DOL panel: IE4 asynchronous allows a transition without changing the panel. For mechanical compatibility, see our Mechanical Compatibility When Moving to IE4 article.
Our transition decision guide, which evaluates the move between IE4 and IE3 by running hours and payback, and our Quiet Operation in IE4 Super Premium Motors article, which addresses the IE4 quietness advantage, complete this decision. You can also examine pole selection in asynchronous motors in our 2, 4, 6 Poles article.
The Difference in Terms of Maintenance and Supply
Because asynchronous motors have been widespread for decades, they are very well established in terms of maintenance, spare parts and service network. SynRM, being dependent on a drive, requires parameterisation and autotune steps at commissioning; we explained this in our drive parameterisation article. The magnet-free structure of SynRM provides an advantage in terms of maintenance and long life; we addressed this in our Maintenance of IE5 Synchronous Reluctance Motors article. For general motor types, our Electric Motor Types and Purchase Map article guides you.
Frequently Asked Questions
Since they are in the same IE4 class, do they both run at the same efficiency?
At the nominal point both meet the IE4 efficiency threshold. However, when the load changes their behaviour differs: the synchronous reluctance motor generally maintains its efficiency better at part load. So in applications that often run at part load, SynRM can be more advantageous in the field even if the nameplate is the same.
Can I connect an IE4 synchronous reluctance motor directly to the grid?
No. Because the SynRM rotor has no cage, it cannot start directly on line; a variable frequency drive is essential for it to operate. If you want to run directly on line (DOL), you should choose an IE4 asynchronous motor.
Which one should I replace my existing asynchronous motor with?
If your application is fixed-speed and your panel is DOL, replacing it with an IE4 asynchronous without investing in a drive is practical. If your application is variable-speed or you already use a drive, a synchronous reluctance motor can be more advantageous with its part-load efficiency. In both cases the mechanical compatibility (frame, shaft, flange) must be verified.
Get a Quote
Let us determine together whether IE4 asynchronous or synchronous reluctance suits your application better. Our team recommends the right technology based on your speed, load profile and drive need. Contact us now at +90 (532) 345 49 86 or request a quote via our contact page.
IE4 Technology Selection Checklist
- Determine whether the application is fixed or variable speed.
- Check whether your existing panel is DOL or drive-based.
- Clarify the average load ratio and part-load duration.
- Evaluate whether you are ready to invest in a drive.
- If fixed speed + DOL, prioritise IE4 asynchronous.
- If variable speed + drive present, evaluate synchronous reluctance.
- Verify the frame size, shaft diameter and flange compatibility.
- Consider your maintenance and service-network needs.
- If you choose SynRM, request a matched motor + drive package.
- Provide the speed, power and load information in full when requesting a quote.